MakeX Challenge 機器人是非常適合應用在國高中階段的科技領域課程,透過打造這一部機器人可以將高中加深加廣課程的工程設計,科技應用,機器人專題和進階程式設計全部結合,也不需要昂貴的費用,一部FRC機器人可以組裝10部以上的MakeX Challenge,是更適合應用在教學場域的最佳工具。
 一、基本底盤製作
一、基本底盤製作
1. 兩輪速差底盤:
透過左右兩邊的動力輪產生輪速差加上一顆輔助輪,使底盤轉向。
優點:結構簡單、控制容易、移動程式撰寫簡易。缺點:不能夠橫移全向移動、有迴轉半徑問題
2. 三輪全向輪底盤:
三個馬達夾角都為120度,旋轉不同的馬達使全向輪產生分力,達到分力抵銷朝某個方向前進
優點:能夠全向移動、能夠三點共面不打滑
缺點:結構複雜、程式撰寫複雜、特定方向移動較慢
3. 四輪十字全向輪底盤:
四個馬達夾角都為90度,旋轉不同的馬達使全向輪產生分力,達到分力抵銷朝某個方向前進
優點:能夠全向移動、較能載重、結構簡單
缺點:有可能一輪懸空打滑、特定方向移動較慢
4. 四輪麥克納姆輪底盤:
馬達架設方式就像正常汽車一樣相互平行,透過旋轉輪子讓不同角度的輪子乎相抵銷分力,達到朝目標移動
優點:能夠全向移動、較能載重、結構簡單、走直線較快
缺點:有可能一輪懸空打滑、橫向移動較慢、移動程式撰寫複雜
5. 四輪差速底盤:
馬達架設方式就像正常汽車一樣,但轉向只能靠不同邊輪子轉動不同方向來旋轉,必定出現側滑
優點:不用使用特殊的輪子、較能載重、結構簡單
缺點:轉向會出現側滑、不能全向移動
6. 四輪阿卡曼底盤:
馬達架設方式就像遙控車一樣,但轉向需要依賴另外一顆馬達來控制轉向
優點:不用使用特殊的輪子、結構簡單、移動速度快
缺點:轉向太快動力輪可能打滑、不能全向移動
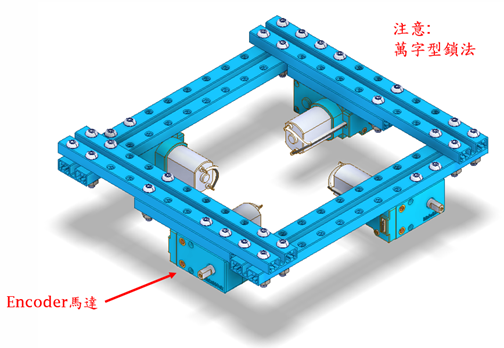
7. 四輪卍字型底盤:
四輪卍字形底盤像四輪十字全向輪的變化,可以改變馬達的放置位置來節省空間
優點:能夠全向移動、較能載重、結構簡單、較節省空間
缺點:有可能一輪懸空打滑
8. 履帶型底盤:
馬達架設方式就像戰車一樣,轉向也是靠兩邊履帶產生速車來轉向
優點:不用使用特殊的輪子、結構簡單、能夠爬坡越野
缺點:不能全向移動、速度較慢
底盤形狀比較:
9. 三輪全向輪移動分力:
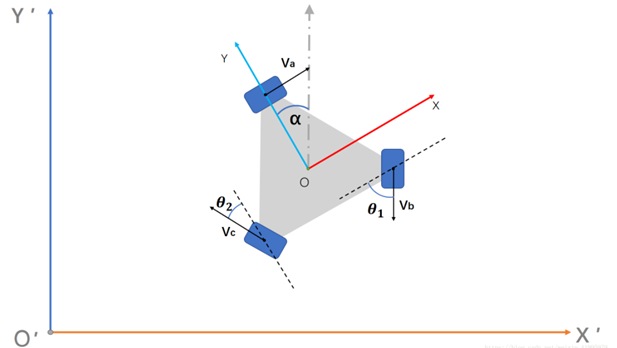
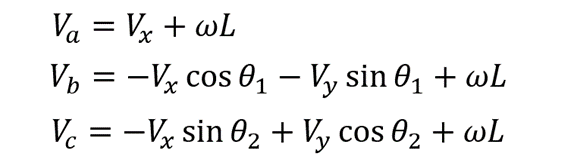
三個全向輪馬達架設的夾角都為120度,世界坐標系為X’O’Y’以底盤自身XOY坐標系,移動平臺自身的角速度爲ω,設順時針爲角速度正方向,各個輪子的速度分別爲Va、Vb、Vc,移動平臺在自身座標系下的分速度爲Vx、Vy,夾角θ₁ = π / 3,θ₂ = π / 6 。α是兩個座標系的夾角,可以列出每個輪子分別的速度。
10. 四輪麥克納姆輪移動分力:
四個麥克納姆輪馬達架設的夾角都為相對應架設,麥克納姆輪四個輪子為一組分別有各兩顆左旋輪、右旋輪,旋轉時會產生一個45度方向的分力如下圖T1,根據要朝哪個方向來分配四顆馬達旋轉的速度,不同方向的分力相互底銷後即朝向目標方向移動。
車輪向前旋轉
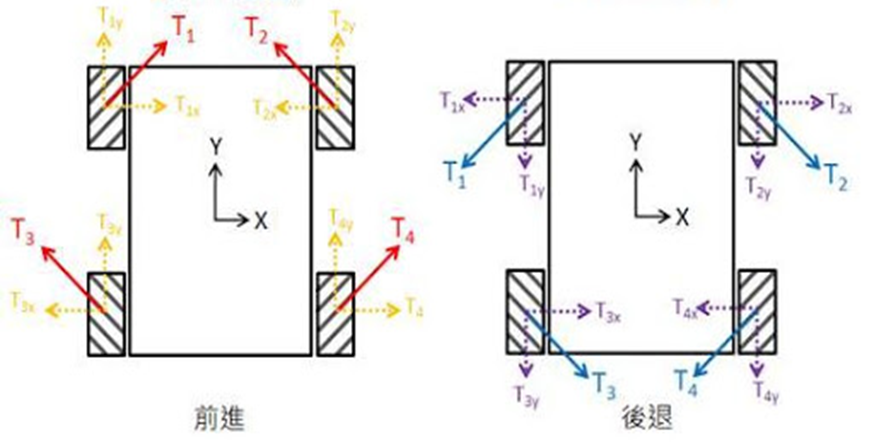
車輪向後旋轉
11. 底盤是機器人移動最重要的結構,負責支撐本體所有重量,依照移動環境不同支撐重量不同底盤型式也有不同,所以在底盤的設計上是很關鍵的。
要使底盤活動需要:1.結構件(底盤本體)2.Nova Pi (主控板)3.電源管理模組4.動力源(馬達)5.能源供應(電池)6.程式
嘗試組裝出底盤: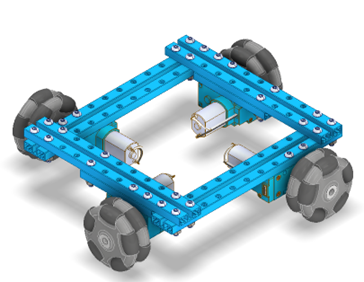
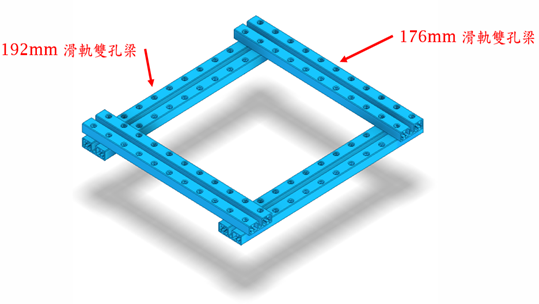
架出框架:
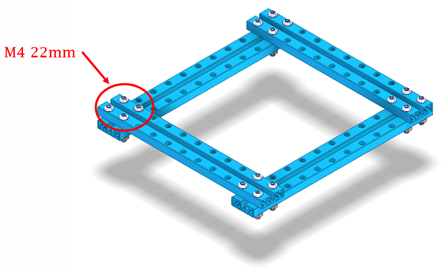
鎖上框架螺絲:
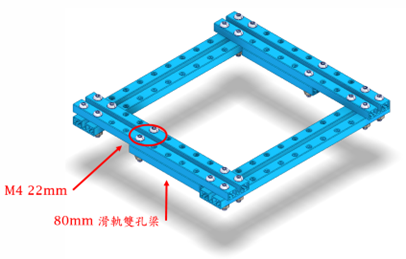
鎖上馬達墊材和螺絲:
鎖上馬達:
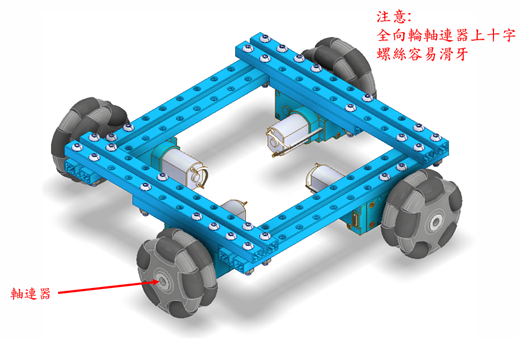
鎖上全向輪:
二、感應器與程式介紹
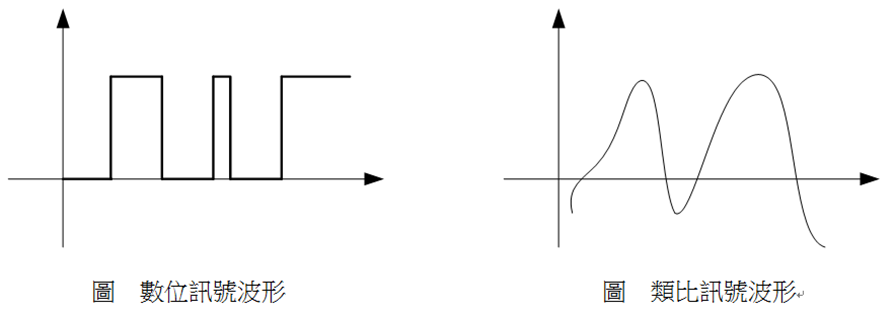
機器人能知道外在環境的狀態,就是透過不同的感測器傳遞數位訊號或是類比訊號給機器人,有如人類的視覺、聽覺再透過程式判斷來決定機器人的動作
數位訊號:分為0跟1,0就是沒有1就是有,就像是非題一樣。
類比訊號:訊號有大有小,反應強烈數值很高,反之不強烈數值很低
1. 雙路RGB顏色感測器:
雙路RGB顏色感測器上有兩組RGB感知器,能夠各別測量出物體反射的RGB數值,上面有LED補光燈能在陰暗的環境增加光線反射的量,工作範圍:0.5~1.5cm,用途:循跡、感測物體顏色。
2. 測距感測器:
測距感測器上有一組紅外線感知器和一組紅外線發射器,能夠各別測量出物體反射的紅外線數值,離物體太近會產生盲區
工作範圍:2~200cm 誤差±5% ,用途:感測離物體距離、靠牆校正
3. 超聲波感測器:
人耳能接收到的頻率為20~20000HZ超過20000就稱為超聲波,超聲波感測器能夠檢測它與被測物體之間的距離。超聲波感測器的左邊探頭負責發射超聲波,而右邊探頭則負責接收超聲波,工作範圍:5~300cm 誤差±5%,用途:感測離物體距離、靠牆校正、避障。
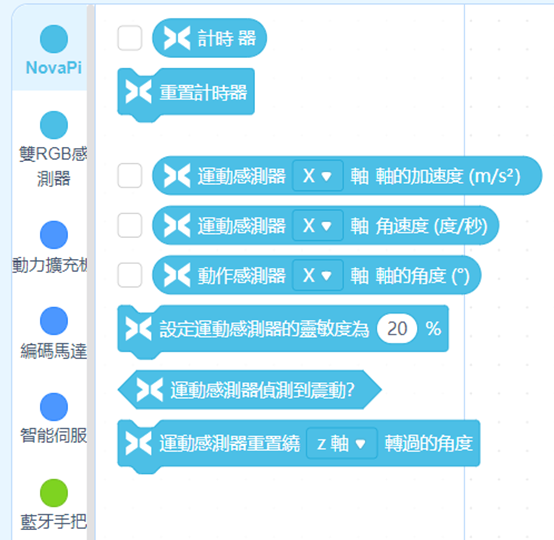
4. 運動感測器:
運動應器器包含一個 3軸陀螺儀 以及一個 3軸加速度計 ,具備能夠檢測機器人的運動狀態、加速度、震動強度,工作精度: ±1度 加速度±8g,用途:檢測機器人的運動狀態、校正方向、三軸穩定器
5. 按鈕感測器:
按鈕感測器按下後傳回1訊號沒有按下保持0狀態,用途:開始按鈕、計數、切換模式
6. 角度感測器:
角度感測器是由磁編碼器製作而成,其可以精確檢測旋轉的位置,轉一圈為360度,又稱Encoder,工作精度: ±1度
用途:檢測軸轉動角度、舵輪轉動角度
7. 視覺模塊:
視覺模塊能夠識別條碼和線條,也可以學習和識別顏色鮮豔的物體,實現諸如垃圾分類、智慧交通、物體追踪、智能巡線等功能
工作範圍:25~120公分最佳 工作速度:60偵/s
用途:影像辨識、物件追蹤
8. NovaPi:
NovaPi主控版是新一代MakeX主控版,具有一個高性能M7處理器ATSAMS70N20A-AN以及一個STM32F030CCT6協處理器,具有5個感應器接口,6個馬達接口。感應器接口使用串口通訊,對外輸出5V電壓。智能伺服馬達接口使用串口通訊,對外提供12V電壓。NovaPi主控板載6軸傳感器,可測量X,Y,Z三個方向上的加速度和X,Y,Z三個方向上的旋轉角速度。 NovaPi可搭配動力擴充板使用,提供更加豐富的擴充與資源。
9. 藍芽模組:
藍牙模組能夠使你的機器人與 Makeblock 藍牙適配器或支援藍牙4.0的設備建立無線連線,使你能夠無線地控制你的機器人
工作範圍:10m
用途:連接搖桿、連接電腦傳輸程式
10. 藍芽手柄:
Makeblock藍芽手柄上有藍芽發射器能跟機器人上的藍牙模塊進行連線,搖桿上共有15個按鍵2個搖桿,可以透過程式來定義按鈕分別控制機器人的移動
工作範圍:10m
用途:遙控機器人
11. mBlock:
Makeblock的程式軟體使用mBlock圖形化介面程式來撰寫,介面跟Scratch有幾分相似之處,以前有使用過Scratch的經驗對於mBlock可以很快的上手。 mBlock還能轉換成Python,對於有一定程式經驗的人使用Python來撰寫程式控制機器人,相較於圖形化介面程式來的方便快速。
12. mBlock介面介紹:
點開mBlock會看到左上方有一個角色視窗,左下方為角色狀態欄可以選擇設備、角色、背景用來切換程式頁面分別對於那個角色撰寫。
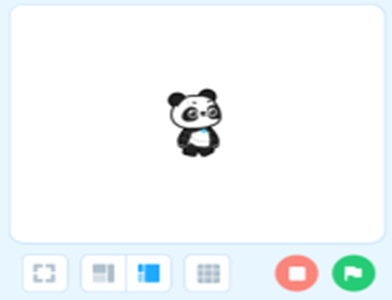


中間有一欄可以選擇不同程式方塊集,下方有個延伸集可以加入不同的程式方塊或是感應器方塊,右方會出現對應的程式方塊選單
程式方塊集
本文長達近40頁,且多數圖表無法在網頁上完整呈現,為求更好的學習品質,請購買iPOE科技誌第7期。