- 教案概述
領域/科目別 | 科技領域 | |
教學時數 | 18小時,數不清用了多少時間(教學時間很短、除錯時間很長) | |
教學對象 | 國小4至6年級 | |
課程簡介 | 這門課程是一個關於2023年第四屆START!AI智慧小車的競賽所設計的課程,旨在推動國教署科技中心計畫,配合十二年國民基本教育課程發展,落實科技領域課綱規劃,奠定學生生活及資訊科技之基礎,實踐做中學的想法。 本課程主要是通過學習運算思維及機構設計,以2至4人的小隊方式進行科技創作和任務式學習,激發學生創造思考和團隊合作,提高學生對科技、AI人工智慧和機器人學習之興趣。參加比賽是為了驗證學習成效,各隊伍將學習當前人工智慧的發展目標以及在日常生活中的應用,透過AI影像辨識技術完成AI智慧小車的任務挑戰競賽。 本課程規畫將幫助學生建立多項新知識與新技能,如手工具熟練操作、運算思維、機械結構功能設計和AI影像辨識,進一步激發學生對科技創新的熱情。 | |
課程內容 | 本課程旨教導學生如何使用mbot主控板、TT馬達、四路循線模組、哈士奇AI視覺辨識模組和機械手臂夾爪等硬體組件,並結合AI智慧技術,設計並製作智慧小車,完成競賽組夾球放球與指定停車任務。 在此課程中,學生將通過編程和實踐,學習使用智慧小車以及與其他硬體組件的整合。除了學習如何設計智慧小車四路循跡功能,學生還將學習如何解決實際應用中可能遇到的問題,從而提高自己的問題解決能力和創造力。這些技能和知識將對學生未來的學習和職業生涯產生積極的影響,並有助於培養學生的STEM思維和創新能力。 | |
學習目標 |
| |
學習表現 | 科議a-Ⅲ-2 展現動手實作的興趣及正向的科技態度。 科議s-Ⅲ-2 使用生活中常見的手工具與材料。 科議c-Ⅲ-1 依據設計構想動手實作。 科議c-Ⅲ-3 展現合作問題解決的能力。 資議t-Ⅲ-3 運用運算思維解決問題。 資議A-Ⅲ-1 結構化的問題解決表示方法。 | |
學習內容 | 科議P-Ⅲ-2 工具與材料的使用方法。 科議A-Ⅱ-2 日常科技產品的基本運作概念。 資議P-Ⅱ-1 程式設計工具的介紹與體驗。 資議P-Ⅲ-1 程式設計工具的基本應用。 | |
所需工具 |
| |
教具準備 |
| |
所需材料 |
| |
先備知識 |
| |
- 教學活動步驟
第一單元: 認識mBot主控板與車體組裝
- 教學時間:6堂課
- 學習目標:
- 學會連接並使用mBot主控板
- 學會使用mBlock 5軟體編寫基本的控制指令,並了解主控板的硬體結構和功能。
- 學會組裝與操控TT馬達與輪胎
- 了解使用TT馬達與輪胎,學會如何控制智慧小車前進、後退、轉彎等基本動作。
- 學會使用循跡模組,將其安裝在智慧小車上,並程式設計實現四路循跡功能。
- 學習內容:
首先先學習組裝智慧小車主體,這個過程會使用手工具來組裝,訓練學生能精熟的操作手工具,必須注意安全與力道,避免損傷智慧小車或讓自己受傷;後續也必須學會使用mBlock 5軟體編寫基本的控制指令,學會燒錄程式來控制智慧小車前進、後退、轉彎等基本動作,最後搭配四路循線模組,能快速地在競賽組賽道地圖上,循線快速移動、精準停車與不出軌等重要評量指標。
- 評量方式:採用實作評量(精熟、優良、可的三階段成績)
表現等級 基準相度 | 精熟 | 優良 | 可 |
車體組裝 | 整個車體螺絲鎖的很穩固,模組模組配置位精準無誤。 | 小部分的螺絲鬆動不穩,模組配置位置準確無誤。 | 小部分螺絲鬆動不穩固,有模組安裝位置錯誤。 |
接線 | 接線位置完全正確 | 接線位置部分錯誤 | 不了解接線,需依靠隊友幫忙才能完成 |
燒錄程式 | 自己能快速操作完成燒錄 | 會操作燒錄,只是動作不熟練 | 需依靠隊友幫忙才能完成燒錄 |
智慧小車的運動程式 | 能自己寫好智慧小車的移動(前進後退左轉右轉等動作) | 需參考老師給的範例,自己慢慢完成。 | 需依靠隊友才能寫完程式 |
循線功能 | 能自己完成循線功能,並且會調整參數,讓智慧小車走得更好。 | 需參考範例,自己慢慢完成程式撰寫與測試,只能讓智慧小車完成基礎循線。 | 需依靠隊友幫忙才能完成任務,只能讓智慧小車完成基礎循線任務。 |
- 教學步驟:
- 課程開始,老師一起講解智慧小車會用到的零組件與工具,如下圖1,並且手把手的帶著學生完成組裝,也會示範怎樣組裝智慧小車,最後讓學生自己完成智慧小車組裝。主要從車底盤、TT馬達、輪胎、電源配置等,如圖2接線圖所示,請學生順便完成接線,這個過程是讓學生熟練使用工具,如果有跟不上的學生,就讓老師或動作較快的學生互相幫忙,確保大家的進度相同,組裝完成的智慧小車會讓老師做第一次評量檢查。成果如圖3所示,這個過程可能需要4節課。




圖1 學生自己組裝智慧小車的活動紀錄照片
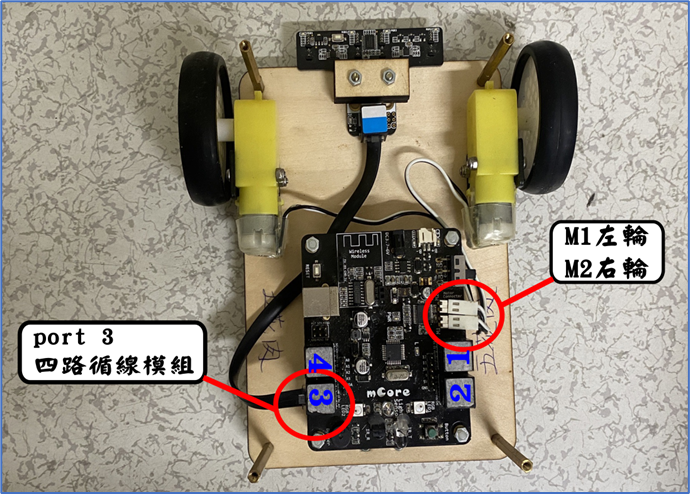
圖2 接線圖
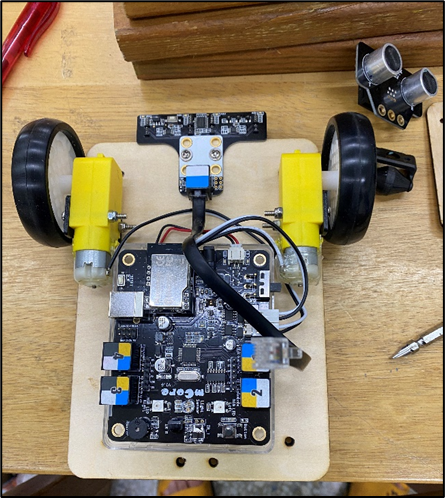
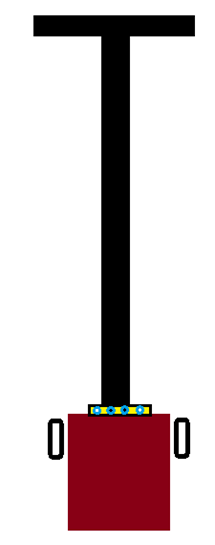
創始的智慧小車(車太重)
|
比賽用智慧小車
|
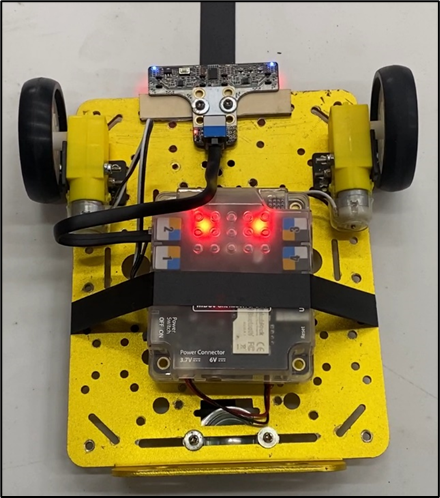
圖3 智慧小車組裝第一階段完成
2. 老師開始講解mBlock 5軟體使用方式,示範教學並且讓學生逐步測試TT馬達與四路循線模組,請學生自己嘗試寫出運動程式,如圖4;教學中帶學生完成模組化程式設計方式,學會使用函數或副程式的概念。這裡老師會做第二次評量檢查。
如圖4 吳同學自己學著寫控制程式
3. Mblock 5 軟體下載à安裝à開啟
(1) 軟體下載位址https://mblock.makeblock.com/zh-cn/download/ (如下圖5)

圖5 網頁下載選擇的畫面
(2) 移除CyberPià添加àmBot (如圖6 選擇擴展硬體設備的操作方式)

圖6 選擇擴展硬體設備的操作方式
(3) 點選à延伸集,如下圖7 à選擇 A. 擴展包 B. RGB循線感測器 C.HuskyLens模組,如下圖8
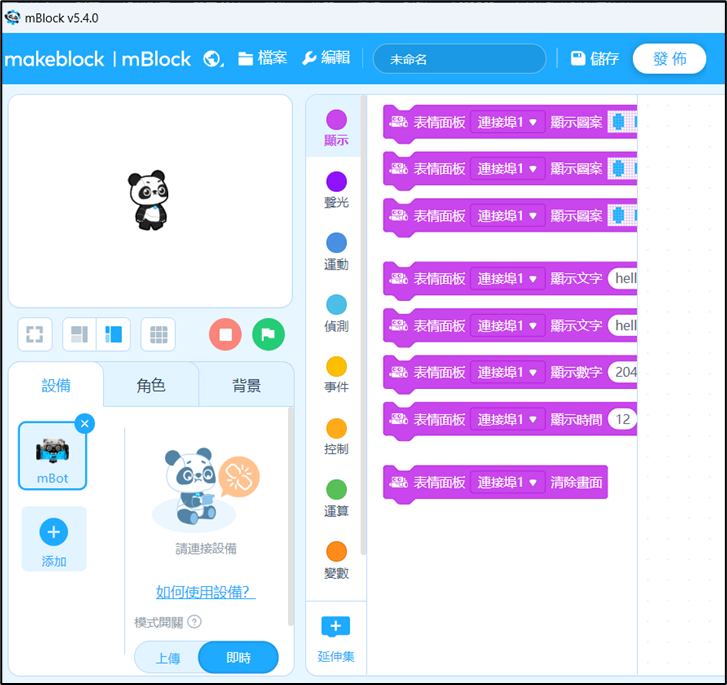
圖7 點選延伸集


圖8 添加3種擴展積木
(4) 將即時模式改成上傳模式,如圖9。


圖9 將即時改成上傳模式
(5)擴展積木樣式,如圖10。



圖10 擴展3種模組相關積木
- 上傳程式方法à連接à選擇正確的COMà再點選上傳進行燒入資料到主控板中,
如圖11,並且mBot主控板要接上電腦,主控板也需要打開電源,如圖12。



圖11 連接硬體到上傳程式操作方式
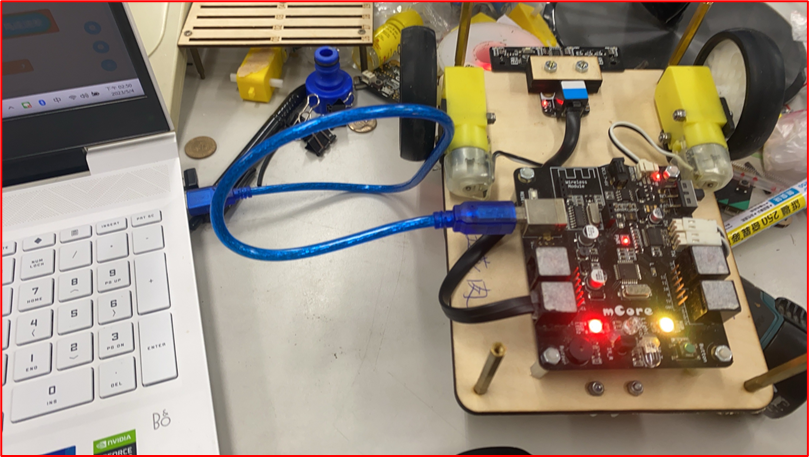
圖12 主控板要接上電腦並且打開電源才能上傳程式
5. 撰寫程式
(1)馬達功能測試(循線運動採用前輪為驅動控制)
程式說明: 按下主控板按鈕後1秒,TT馬達運轉,先左邊輪子轉2秒停止,換右邊輪子轉2秒停止,如圖13。
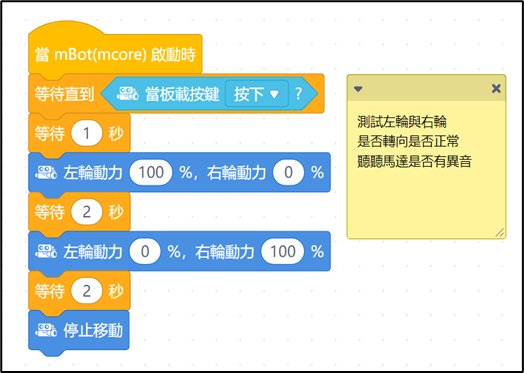
圖13測試馬達程式
(2)四路循線功能測試
設定RGB四路循線模組連接的位置: port 3
設定靈敏度: 0.6~1
設定補光燈顏色: 預設紅色
建立變數: 誤差、速度
程式說明:如圖14
當按下按鈕之後,車子會等待一秒,出發,前進持續0.15秒後,進入循線狀態,RGB四路循線會讀取黑線數值並且馬上修正而且能快速循線移動,這屬於PID控制的其中一種方式,直到RGB四路循跡感測器讀取到全部都是黑線值,就會停車,如圖15。
6. 將所需要的功能,編寫控制程式做成模組化程式方塊。
7. 使用四路循線功能,完成循線前進到十字路口左右轉與指定位置停車等功能,如下面圖16、17 與範例程式可以參考。老師最後在這裡要檢查學生作品是否都右完成,第三次完成評量檢查,這裡需要2節課時間。
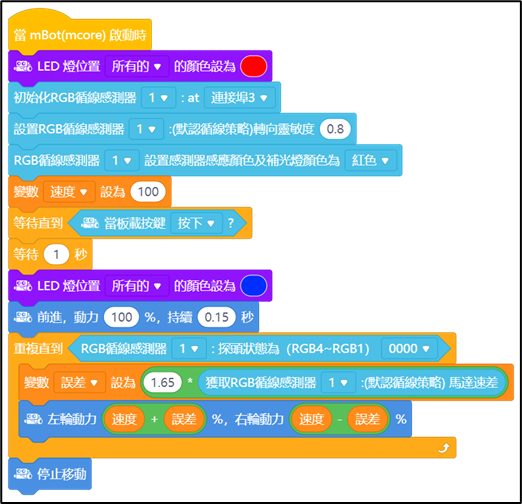
圖14 循線程式圖
15 智慧小車循線示意
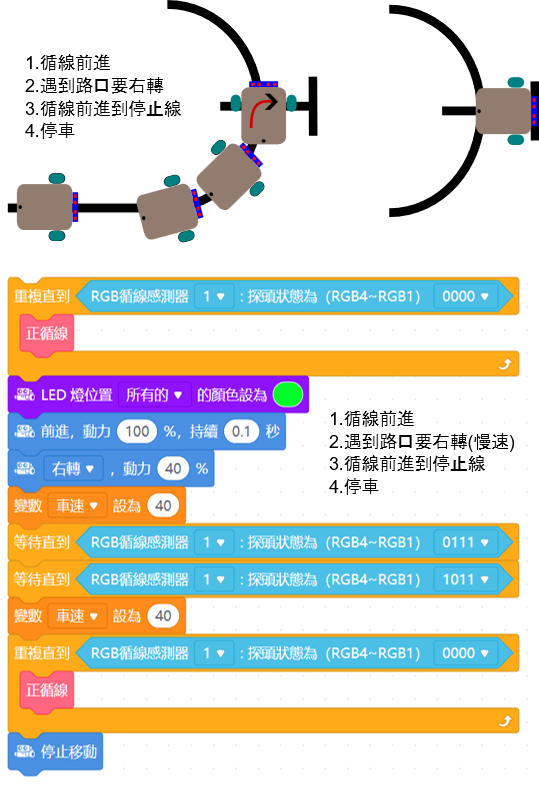
圖16 循線右轉與相對應程式範例
文/圖 張育豪
編按:本文因字數圖表較多,無法全文刊登,如欲參考本文,請誌博客來網路書店購買艾葆科技誌第10期


